モデル予測制御(Model Predictive Control:MPC)は1周期先の状態量を計算し,目標値との偏差を最小にするような制御手法です。計算する状態量はインバータなどのスイッチング素子を用いた回路では取りうる値をすべて計算し,評価を行っていきます。そのため従来のような変調回路が不要となりますが,計算負荷は増大する傾向にあります。そのためFPGAを用いて全てハードウェアで処理することで実時間処理を可能とすることを考えています。
(1) ここでは3相電流形コンバータの出力電流と電源側の位相を制御した結果を記載しています。シミュレーションはSimulinkを用いており,XilinxのFPGAに実装予定です。
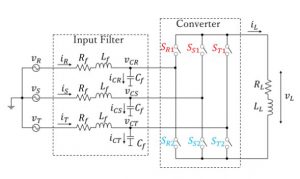 3相電流形コンバータ
3相電流形コンバータ
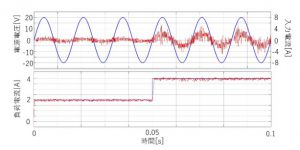
MPCによる制御結果 (上:電源電圧,電源側電流,下:負荷電流)
(2)モデル予測制御を用いて太陽光発電(PV)システムの最大電力追従(MPPT)制御を行った例を示します。系統連系を考え,HブリッジでのMPPT制御を実現しています。ここでは負荷側の電流を検出したを示しています。
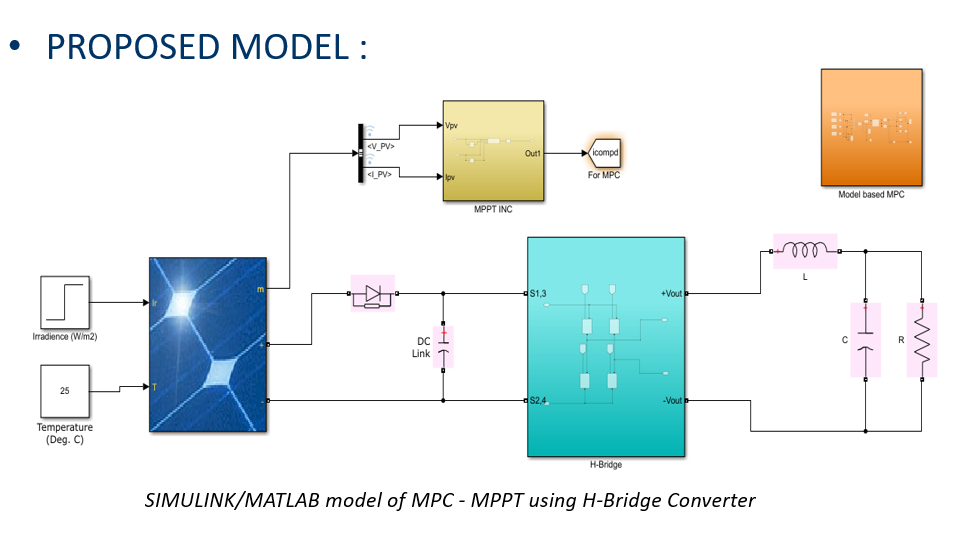 制御系のブロック図
制御系のブロック図
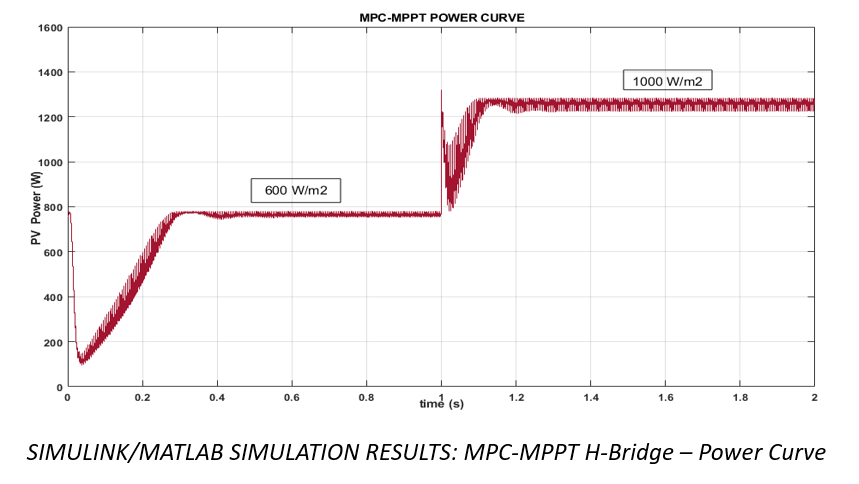
MPPT制御時のPV出力電力