-
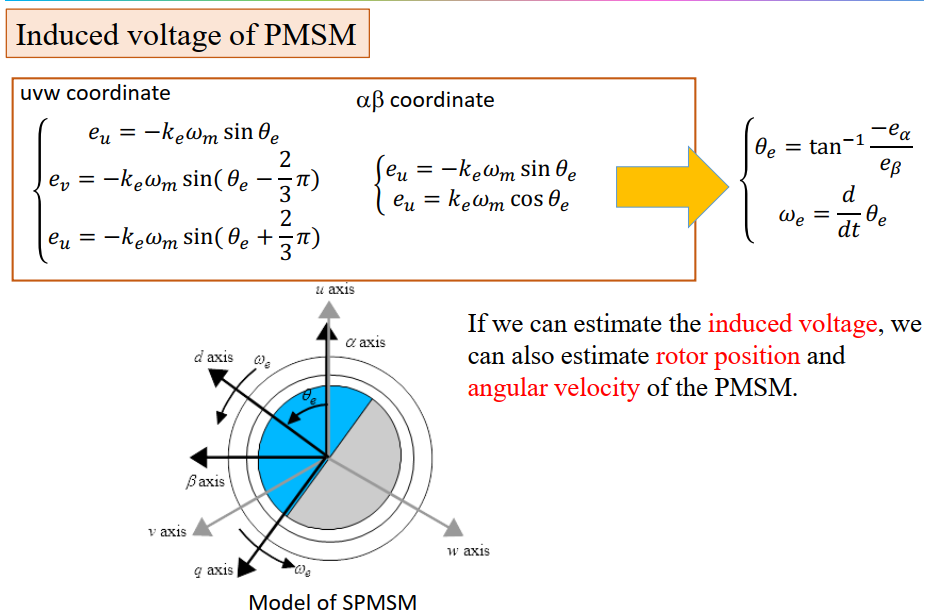
永久磁石同期電動機のセンサレス制御
-
同期リラクタンス電動機のセンサレス制御
-
同期リラクタンス電動機の電気系パラメータ推定
 SynRMの場合は推定する式に使用するパラメータが電流によって変化するため,まず稼働状態でのパラメータ推定を行い,位置推定の精度を向上させることも検討しています。
SynRMの場合は推定する式に使用するパラメータが電流によって変化するため,まず稼働状態でのパラメータ推定を行い,位置推定の精度を向上させることも検討しています。

リラクタンス同期電動機(右)MGセット
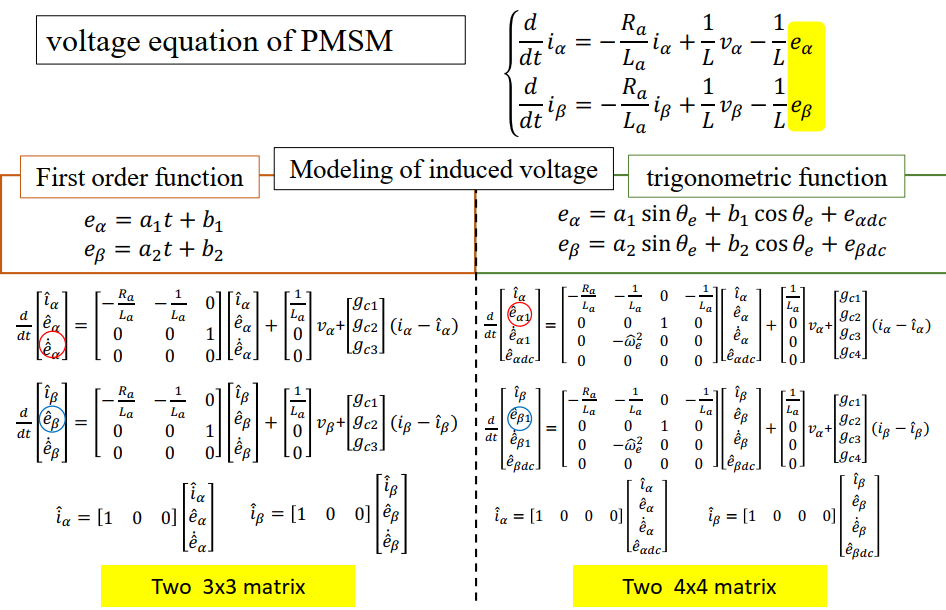
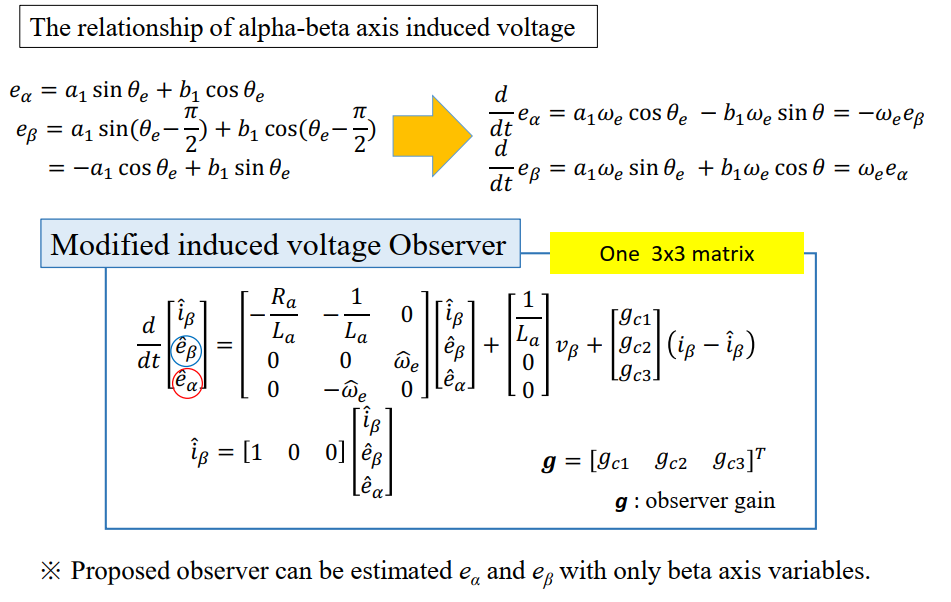
一方で,表面界磁永久磁石同期電動機のセンサレス起動を検討しています。ここでは機械系のトルク方程式から直接回転子位置を推定し,起動後に誘起電圧を推定するオブザーバに切り替えています。
永久磁石同期機と制御用インバータ開発KIT(TI 社製)