高嶋研究室 研究内容
研究紹介ムービーはこちら(7分版,1分版)!!
- 触覚センサの開発
-
低侵襲手術※1において,内視鏡やカテーテル※2と対象内壁との接触力の測定は,安全で迅速な診断に有効であると考えられます(図1).また,正確な接触力が求まれば,生体組織の剛性を算出することができ,関節軟骨の変性などの触診※3への応用が期待できます.
そのため,従来のものに比べて高感度,小サイズ,柔軟な触覚センサの開発を目指し,有機強誘電体※4の触覚センサへの応用を検討しています(試作センサの出力の様子はこちら).さらに,ものづくりの現場で熟練工の手の感覚を代替できるような触覚センサも検討しています. |
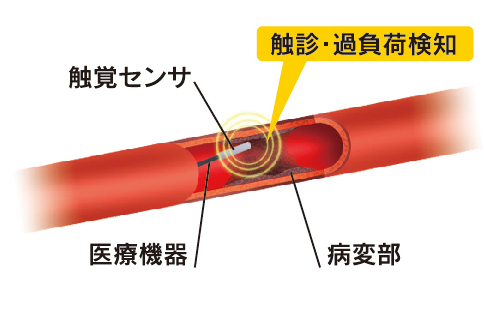
図1 触覚センサ |
-
| さらに,センサ表面に生体機能性分子を固定化することで,生体親和性や生体反応に応答する機能を付与した従来にないカテーテル型触覚センサの検討を行っています(「生体機能性分子」についてはこちらをご覧ください).例えば,表面に生体親和性を持たせることでセンサと生体の接触時の生体の損傷を防ぐことができます.また,生体反応に応答し発生した吸着力を圧電体で検出することにより,生体内の病変部を検出することができます.その結果,新しく開発した細長い触覚センサで狭い血管内を指でなぞるように「触診」し,安全で有効性の高い治療・診断方法の確立を目指しています. |
 (平成26年度機械工業振興補助事業) <紹介記事はこちら> (平成26年度機械工業振興補助事業) <紹介記事はこちら> |
- 血管内治療デバイス留置シミュレータの開発
-
| 脳血管内でカテーテル※2,ガイドワイヤ,コイルなどを安全に操作誘導するため,血管内治療デバイス留置シミュレータを開発しています(図2).本研究では,数値計算と実験の2つを統合し,コイル塞栓術の定量的な評価を行える環境の構築を目指しています.数値計算では,血管壁,血管走行,カテーテル等の力学特性および挿入手技によるパラメータを持つ運動方程式を計算し,病変部への治療デバイスの通過経路や血管から受ける反力などの計算結果を数値データおよび動画で表示しています(参考動画1をご参照下さい).実験では,実体血管モデルに治療デバイスを挿入し,その挿入経路や反力を測定しています(参考動画2をご参照下さい). |
図2 計算例 |
|
| 開発してきたシミュレータを用いることで,治療手技の定量的分析,最適な治療デバイスの設計,適切な術前・術中計画が可能になると考えられます.さらに,近年血管内治療の安全性向上のために,さまざまなカテーテル型触覚センサ(図1)が開発されていますが,これらの評価にも用いることができます. |
(参考動画2)
- スマートマテリアルのロボットへの応用
-
人間は行う動作に応じて,関節の周りの屈筋・伸筋を弛緩・収縮させることにより,関節を柔らかくした り硬くしたりさせます.我々は,ロボットのアームやフィンガーでも人間と同様に「柔軟性」と「大きな力」を両立させた動作が行えるように,スマートマテリアル(形状記憶ポリマーや人工筋肉)の応用を検討しています.
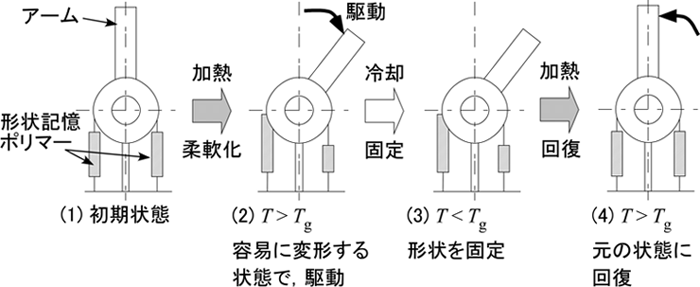
形状記憶ポリマー(SMP)とは,成型加工後に力を加えて変形しても,ガラス転移温度(Tg)※5以上に加熱すると元の形状に回復するポリマーです.さらに,SMPは室温付近に設定されたTg以上に加熱すると弾性率が大きく変化し,約100〜1000分の1になります(図3).このため,Tg以上でゴムのように柔らかく大変形可能で,その状態でTg以下にすると,変形した任意の形状を保持したまま,ガラスのように固く変形しにくくできます(形状固定性).その後,Tg以上に再加熱すると,材料は柔軟性を取戻し,本来の弾性力によって元の形状に回復します(形状回復性,以上の特徴については参考動画もご参照下さい).このようなSMPの特徴を活かし,SMPを剛性変化する受動要素としてのみ用いる姿勢維持モジュール(図4および参考動画をご参照下さい)や,SMPを実装したソフトアクチュエータ(McKibben型アクチュエータ※6(図5),湾曲型空気圧ゴム人工筋※7(図6および参考動画をご参照下さい)),力覚センサ,触覚センサ(参考動画をご参照下さい)を開発しています.
さらに,SMPをロボットへ応用してきた要素技術を組み合わせ,柔軟性と感度可変のロボットアームの開発を行っています.温度によって剛性の変化するSMPに電熱線を埋め込み温度制御することによって,微細な感覚と硬さ(人間の柔軟性と工場で従来使われてきた金属製のロボットのような正確性と剛性)を自在に切り替えることが可能になり,高感度と高剛性を併せ持ったロボットアームの開発が期待できます(図7). |
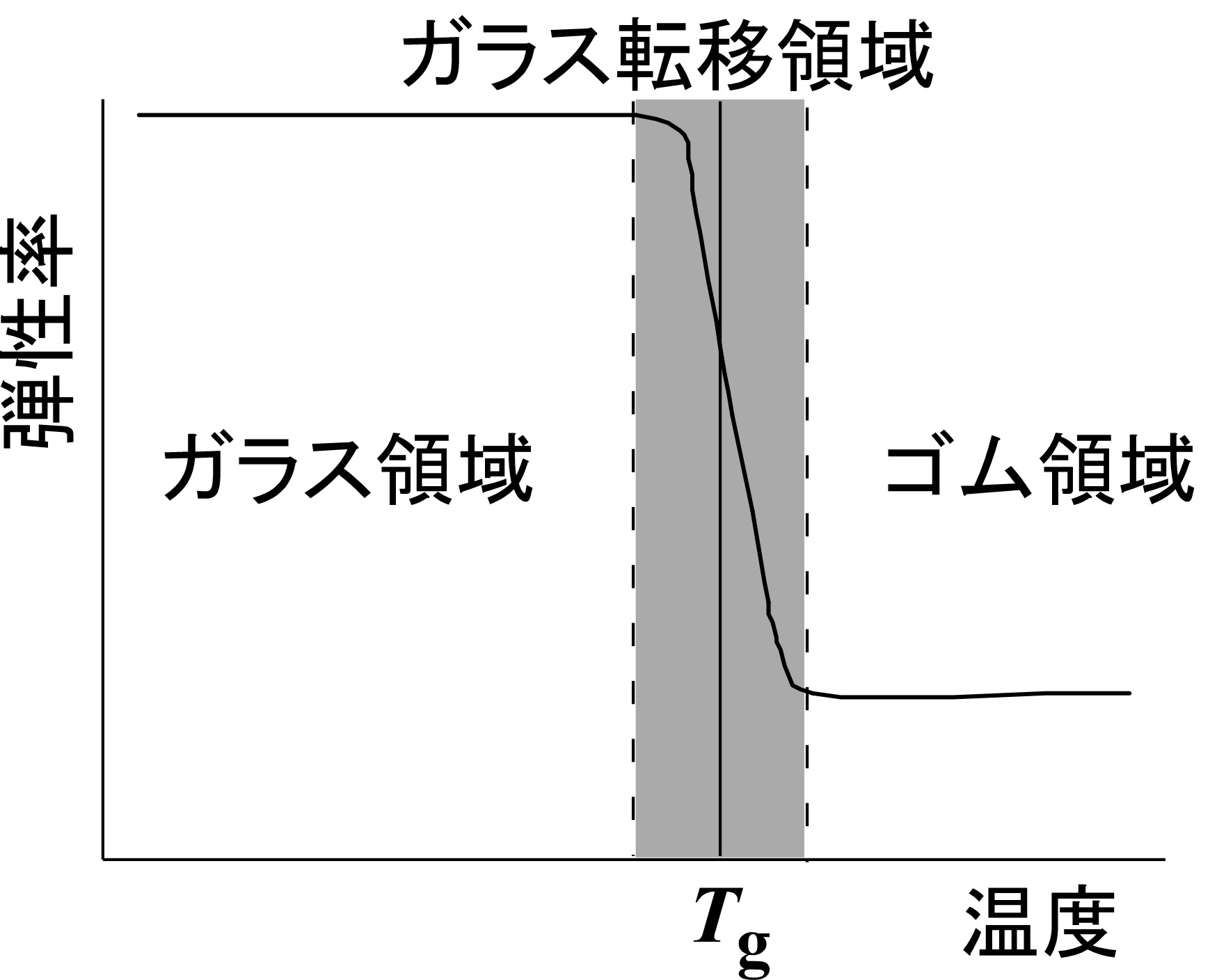
図3 形状記憶ポリマーの温度と弾性率の関係
|
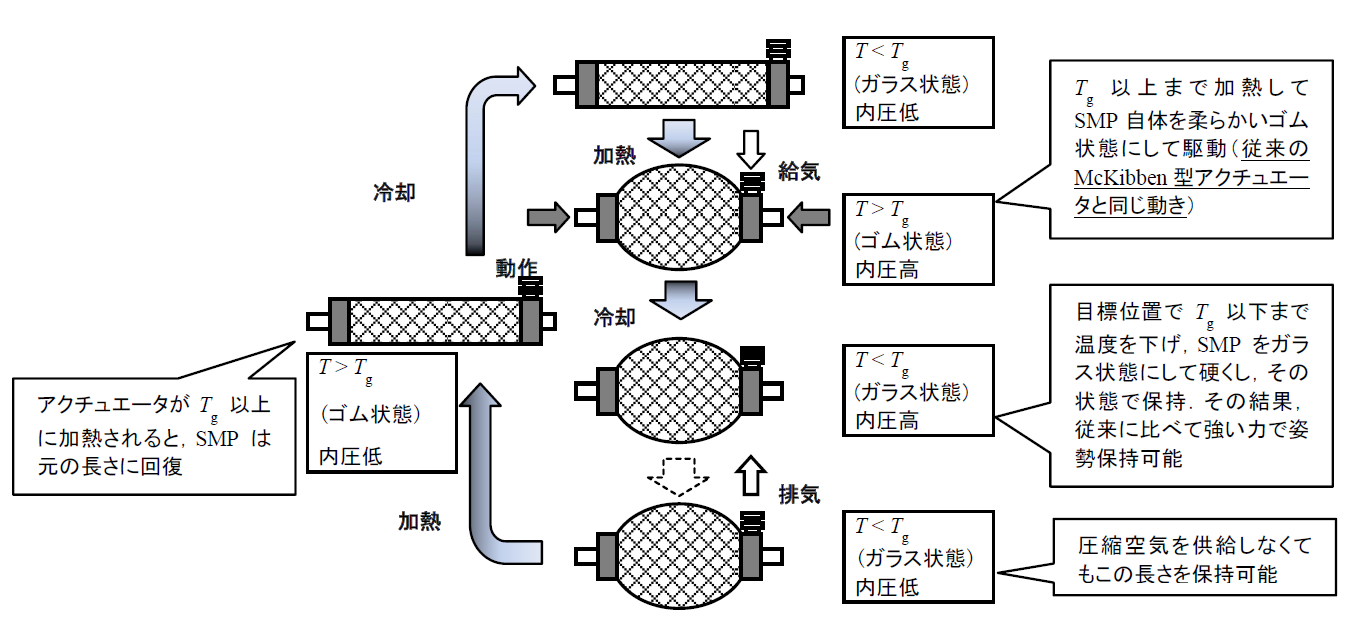
図5 形状記憶ポリマーを用いたMcKibben型アクチュエータ
|
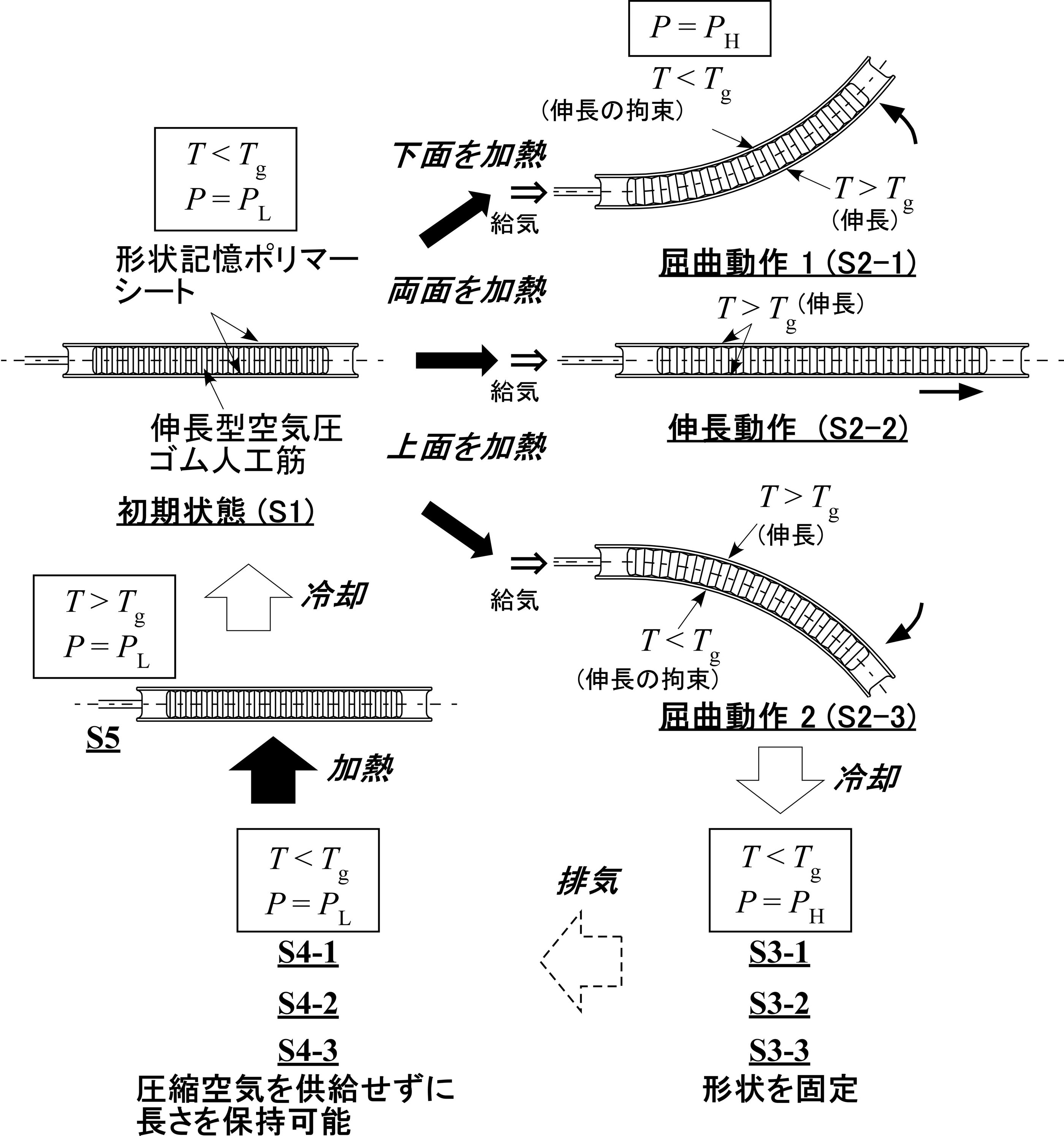
図6 形状記憶ポリマーを用いた湾曲型空気圧ゴム人工筋
(参考動画)(1),(2),(3)(形状記憶ポリマーを全面に塗布した空気圧ゴム人工筋の動作の様子です.加熱する部分によって湾曲方向が変化します.)
|
(参考動画)(Tg以下),(Tg以上)(形状記憶ポリマーを用いた触覚センサにL字形状の荷重を加えたときの出力の様子です.温度によって出力の分布が変化します.)
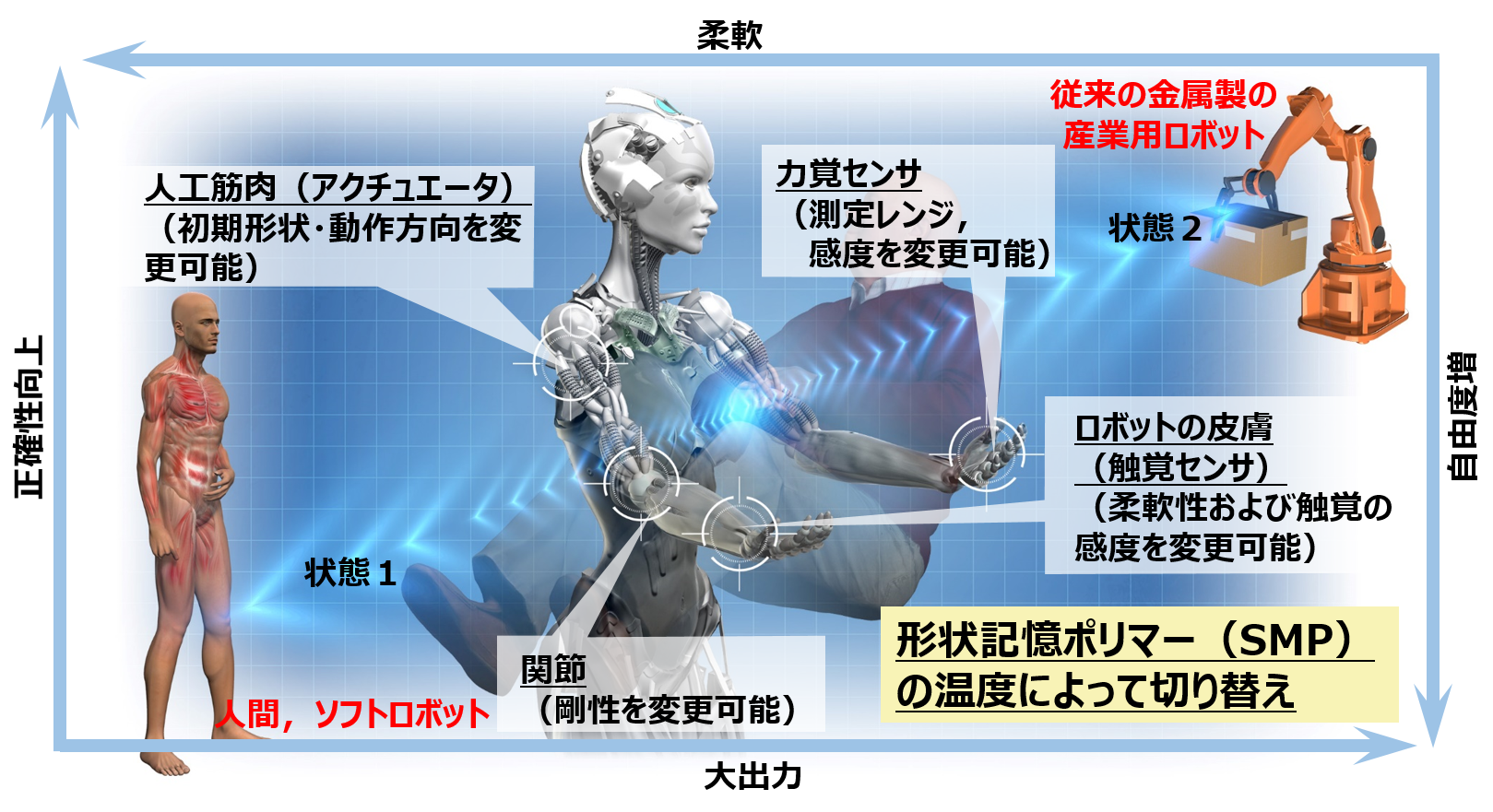
図7 形状記憶ポリマーを用いたロボットアーム
|
(補足説明)
※1 低侵襲手術
カテーテル※2や内視鏡等の細長い医療機器を用いるもので,患部を切開しないか,切開を最小限に留めるので,患者の苦痛の軽減,治療時間の短縮,生体組織の損傷の減少,治療コストの低下,機能回復期間の短縮等の利点がある.
※2 カテーテル
脳梗塞や脳動脈瘤の治療・診断のため,上肢・下肢の末梢血管から,カテーテルと呼ばれる細長い管を挿入して,薬剤や医療器具の挿入を行う.針金状の器具であるガイドワイヤを,中空のカテーテルの中に通し,先に患部への経路を選択したあと,カテーテルの誘導をする場合が多い.
※3 触診
手を用いて,身体の臓器などを触知したり,脈拍などの振動を調べたりすること.生体組織の診断のために,臨床の現場で医師が生体を触診することは,非常に有用であり,体内のさまざまな部分の診断に応用されている.
※4 強誘電体
極性結晶の中でも電界によって自発分極の向きが反転するものを強誘電体という.強誘電体は,圧電性,焦電性も示す.
※5 ガラス転移温度
高分子を加熱したとき,ガラス状のかたい状態からゴム状のやわらかい状態に変わる現象をガラス転移といい,その温度をガラス転移温度(Tg)という.
※6 McKibben型アクチュエータ
網状の繊維スリーブに覆われたゴムチューブの内部に圧縮空気を給気すると長さ方向に収縮し,空気を排気すると元の長さに戻る空気圧アクチュエータ※8である.
※7 湾曲型空気圧ゴム人工筋
湾曲型空気圧ゴム人工筋は,繊維強化などにより,伸長型空気圧ゴム人工筋※9の片側の軸方向の伸長を拘束することで湾曲動作を行う.湾曲型空気圧ゴム人工筋は,圧縮空気供給時にそれ自体が湾曲するので,リンクや軸受など運動変換のための外骨格構造を用いることなく,人工筋を直接身体に装着する内骨格構造による屈曲補助が可能である.
※8 空気圧アクチュエータ
空気圧アクチュエータは,ゴムなどの弾性体に空気等の流体を注入して動力を得るアクチュエータである.軽量・柔軟・高出力などの利点を持つため,ウェアラブルなパワーアシスト装置などへの応用が検討されている.
※9 伸長型空気圧ゴム人工筋
伸長型空気圧ゴム人工筋は,ゴムチューブをポリエステル繊維製などの蛇腹やシートで覆うことによって,圧縮空気供給時にチューブ半径方向への膨張が抑制され,軸方向にのみ伸長する空気圧アクチュエータ※8である.
 研究室のトップページに戻る
研究室のトップページに戻る
 ⇒筋肉を模倣⇒
⇒筋肉を模倣⇒