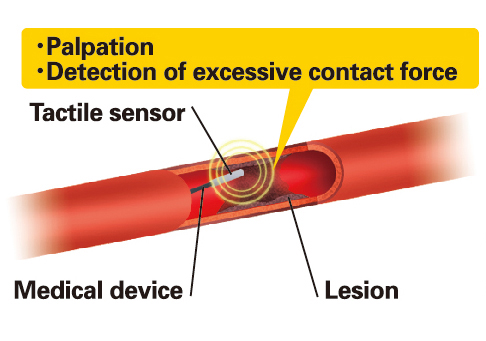
 Fig. 1 Application of tactile sensor for intravascular minimally invasive surgery |
Our research interests are tactile sensors, surgical simulation systems, artificial muscle, and shape memory material (Introduction movie of our laboratory !!!).
Fig. 1 Application of tactile sensor for intravascular minimally invasive surgery |
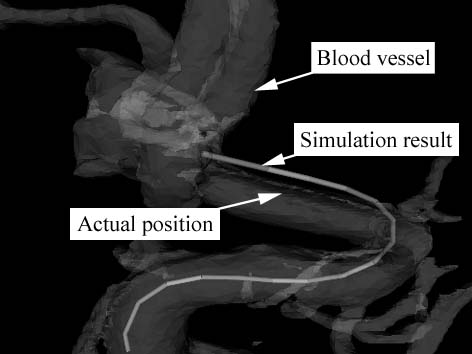 Fig. 2 An example of visualization after catheter simulation |
We have developed a system for simulation of a catheter in blood vessels
for surgical planning and intra-operative assistance (Fig. 2). This system was developed to predict the course of approach to a lesion
and to present numerical results and animation. Consequently, a physician
can easily judge for each patient whether intravascular operation is more
suitable than open surgery, and determine the type of guidewire to be used
in preoperative surgical planning. In addition, this system can aid quick
approach to lesions by comparing the course of passage of a real catheter
on X-ray and that in this simulation system for intra-operative assistance.
|
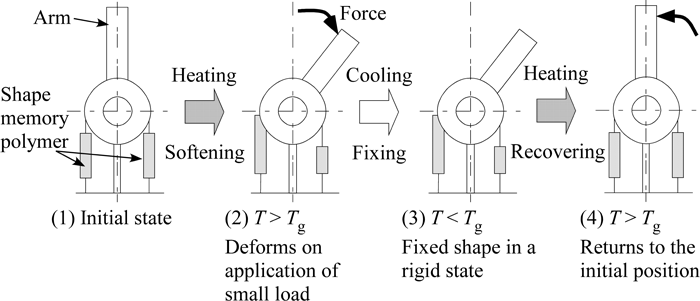 Fig. 3 Schematic of a position-keeping module that uses shape-memory polymer and principle of motion for robotic arm application |
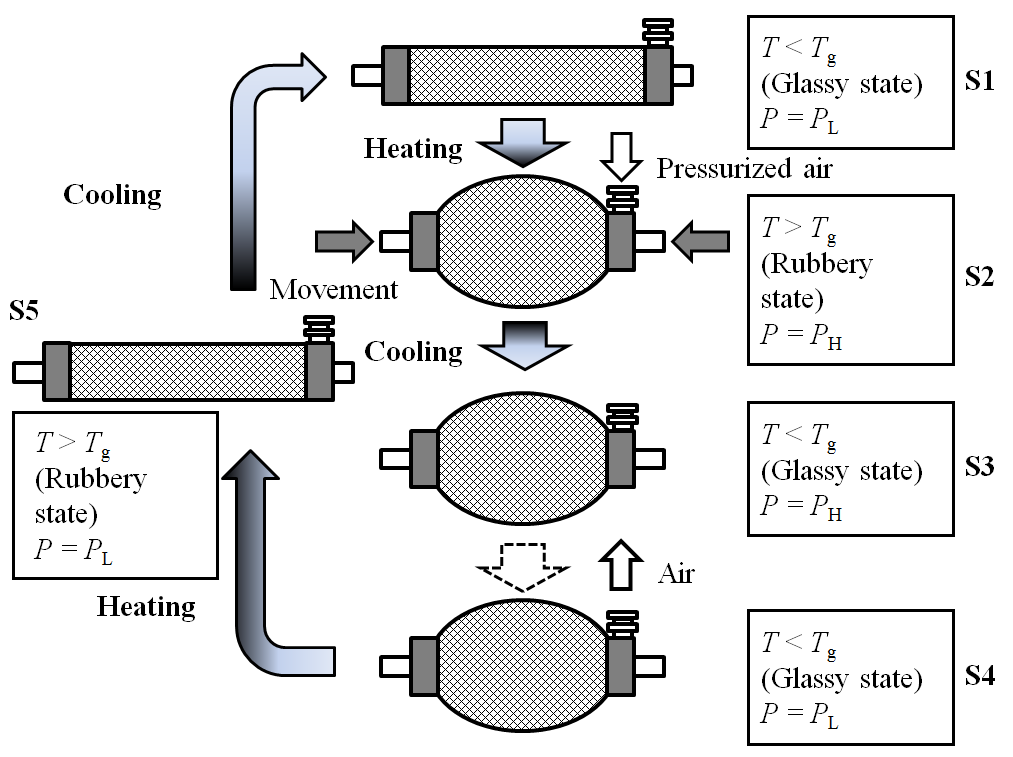 Fig. 4 Schematic representation of McKibben artificial muscle that uses SMP (PH: high pressure, PL: low pressure). |
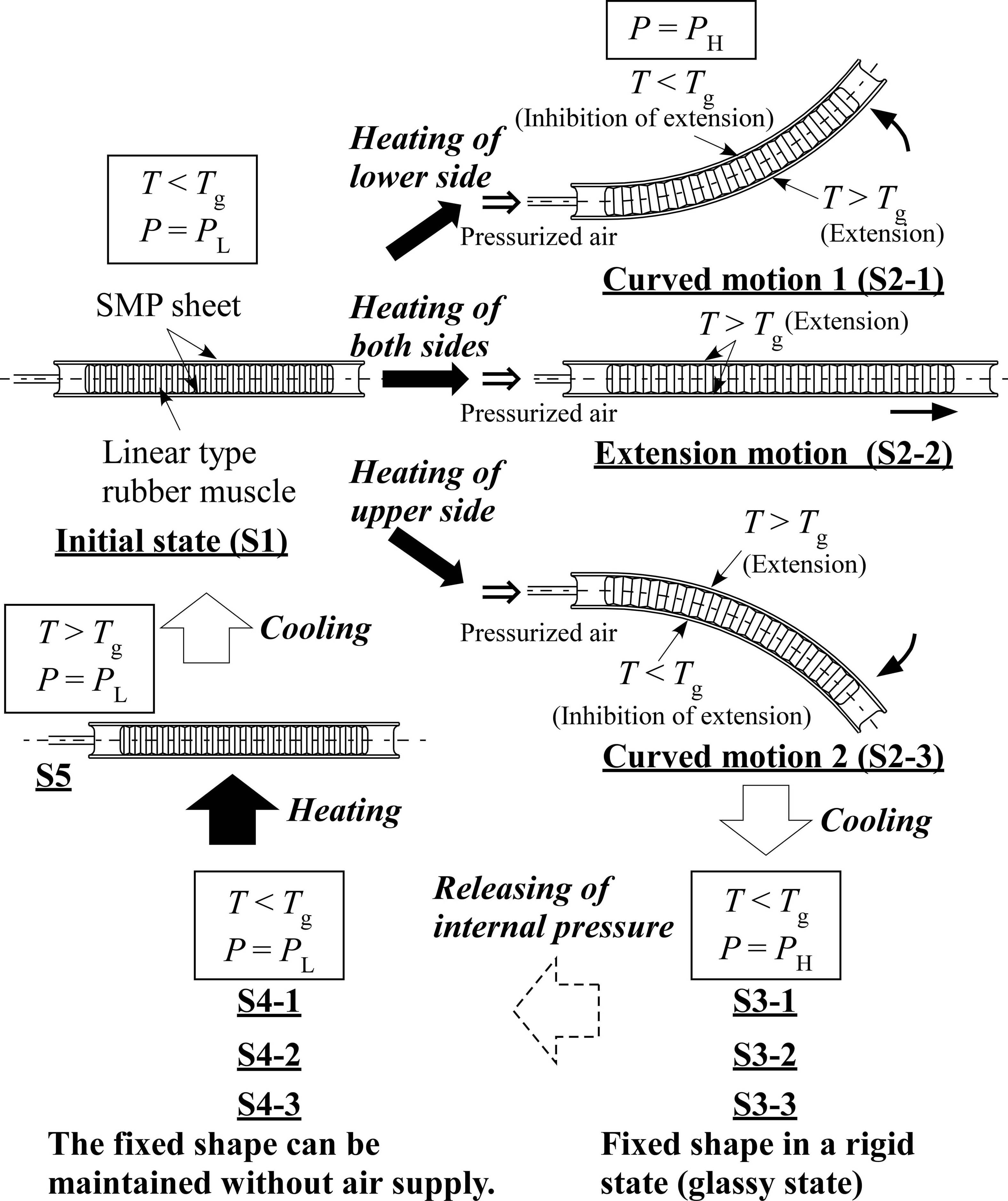 Fig. 5 Schematic of the curved type artificial rubber muscle that uses SMP (PH: high pressure, PL: low pressure). |