Research
1.3(XYZ)軸ボールねじステージ
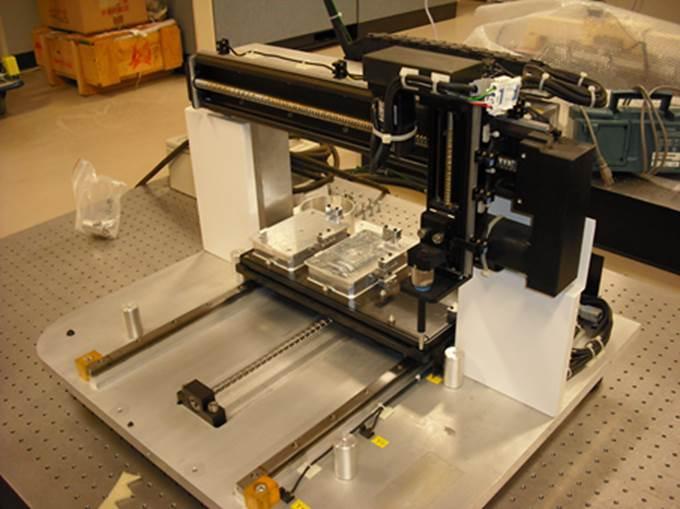
ステージを駆動するY軸、上下に加工端を駆動するZ軸、そのZ軸を左右に駆動するX軸により構成された直交3軸ステージです。Y軸を用いた機台振動系の位置決め制御の研究、X軸・Y軸を用いて円弧軌跡駆動させた際の象限突起補償制御の研究に使用しています。
2.1軸精密ステージ(ボールねじ駆動:THK製)

多くのモータは回転型です。その回転駆動力を直動駆動力に変換するのがねじ機構ですが、その中でも、ガタを防ぎ摩擦を軽減させるボールベアリングを有する、いわゆる「ボールねじスライダ」が、産業界では多用されています。そのボールねじ機構特有の様々な特徴を把握し、さらに高速に・高精度な位置決めを実現すべく、この実験機を用いて研究開発を進めています。
3.タンデム型ツインリニアスライダを並列においたガントリ型リニアスライダ

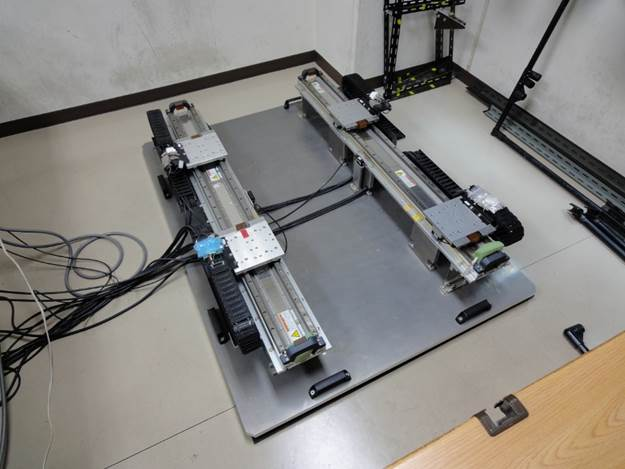
21世紀に入り,汎用のリニアモータスライダが飛躍的に産業界に普及しました。それを背景に,①可動部の高加減速化により,装置全体が振動する,いわゆる「機台振動問題」が顕在化しています。この装置は,その機台振動を模擬することができます。②また,一つのレール上に二つの可動部があることで,同時に異なった動きをすると,互いの駆動を「干渉」する問題も起こります。③また産業界では,並列に直動機構を配置し,その間に梁を渡して大きな被加工物(例えば液晶用ガラス基板)を駆動する装置がありますが,左右の可動部の同期精度を確保することが求められます。この装置により,上記①②③の課題を検討することができます。
4.ガントリ型XYリニアモータスライダ

3と同じく下軸(Y軸)は並列に2本のリニアモータスライダが設置されたパラレルツイン構成ですが、上にも左右に駆動するX軸が構成され、3と異なってX軸が駆動することにより、Y軸の左右軸の負荷にアンバランスが発生するようにした実験機です。最近の大型スライダはこういった構成が多く、産業界で多用されている装置構成で、高精度・高速位置決め制御の研究が可能です。
5.小型4軸ロボットマニピュレータ

教育用に製作された4軸の多関節マニピュレータです。モーション機能を有した一般産業用の上位コントローラにより駆動するようにシステム構成されており、自分で順動力学・逆動力学に基づいた座標変換のプログラムを組まないと動きません。逆に、この実験機を動かすことができれば、ゼロから、多関節マニピュレータの駆動指令を生成できることになります。その他、手先振動の軽減・制振制御実験や数学モデル同定実験に使用できます。
6.1リンクマニピュレータ
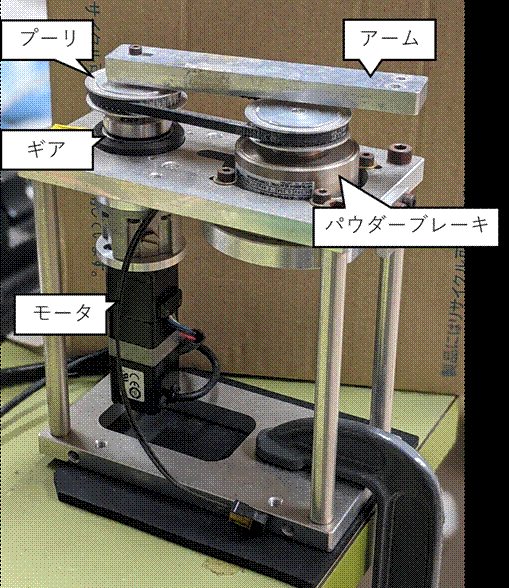
5の1軸分だけを取り出したような、小型の1リンクマニピュレータです。モータ+ギア+リンクのシンプルな構成なので、基本的なマニプの駆動実験に使用できます。過去、この実験機を用いて、衝突検出の研究やAIを応用したトルクリップル予測の研究を行ってきました。
7.弦楽器演奏用補助装置(ギター左手ロボ)
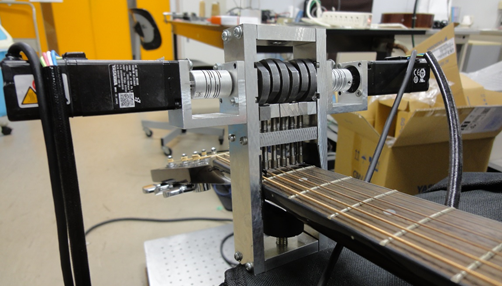

合同会社AMPHIBIA殿との協業により、開発を進めている装置です。手や腕に機能障害がある方や、手早くギターの演奏を楽しみたい方のための装置で、左手の動きをロボで代替し、右手は演奏者が好きなタイミングで・リズムで演奏することができます。機構的にはすべてのコード(和音)を構成することができるので、これ1式であらゆる曲の演奏が可能です。動画はこちら!
〇主な執筆論文と特許
・Control Method for Large-sized Gantry Type Linear Motor Slider with High Feedback Gain (IEEJ International Workshop, Actuation, Motion Control, and Optimization (SAMCON2021), 2021)
・High precision control model of large-sized gantry-type linear motor slider (ROBOMECH Jouranal (2020))
・Control Performance Improvement of High-load Position Control System for Twin Drive Actuator (IEEJ International Workshop, Actuation, Motion Control, and Optimization (SAMCON2020), 2020)
・Consideration of Multi-Degree of Freedom Vibration on Large-sized Gantry Type Linear Motor Slider (Journal of Robotics and Mechatronics, 2019)
・Study on Control Model Structuring of Large-Sized Gantry-Type Linear Motor Slider by Measuring Frequency Response (The 5th International Workshop, Actuation, Motion Control, and Optimization (SAMCON2019), 2019)
・Control Model for Large-Sized Gantry-Type Linear Motor Slider (Electrical Engineering in Japan (English translation od DEnki Gakkai Ronbunshi, 2018)
・大型ガントリ型リニアモータスライダの制御モデルに関する研究 (電気学会論文誌D、2017)
・Consideration on Control Method of the Large-sized Gantry-Type Linear Motor Slider (2017 IEEE International Conference on Mechatronics and Automation (ICMA2017), 2017)
・Study on Control Method of the Large-sized Gantry Type Linear Motor Slider with Distortion (2016 19th International Conference on Electrical Machines and Systems (ICEMS2016), 2016)
・Syncronization control for Twin-axes table drive system (IECON 2015 – 41st Annual Conference of the IEEEIndustrial Electonics Society, 2015)
・Synchronization Error Suppression Control for Twin-Drive Table System (Proceedings of The 12th International Conference on Motion and Vibration (MOVIC2014), 2014)
・Decoupling Control of 2-Link Manipulator by Using Model Following Control (SICE Journal of Control, Measurement, and System Integration, Vol. 7, No. 1, pp. 041–047, January 2014)
・Decoupling Control of 2-link Manipulator by Using Model Following Control (Proceedings of 2012 12th International Conference on Control, Automation and Systems,TD09-3,pp1049-pp1054)
・スライディングモード制御を用いたパルス間位置決め(平成21年8月)(電気学会論文誌D編,129巻8号,pp817~pp824)
・車輪型ロボットの不整地面ロバスト走行制御(平成16年11月)(日本機械学会論文集(C編)70巻、699号、pp3212~3219)
・リニアモータ駆動直列ツインスライダの位置決め制御(平成16年9月)(電気学会論文誌D編、124巻9号、pp901~pp908)
・A Positioning Control for Serial Twin Linear Sliders with Linear Motor Drives(平成16年7月) (Proceedings of 2004 Japan-USA Symposium on Flexible Automation, JS006)
・Adaptive Control of a Feed Drive System hindered by a Machine Stand Vibration(平成16年3月) (Proceedings of International Symposium on Bio-inspired System Part Ⅴ ; Robotics and Motion Control, pp38-43)
・Robust Acceleration Control of Wheeled Mobile Robot Moving on Rough Surface(平成16年1月)(Proceedings of The Ninth International Symposium on Artifical Life and Roboics,pp5~pp8)
・台の振動抑制を考慮にいれた位置決め機構系への適応PI制御法の適用(平成15年10月)(電気学会論文誌C編、123巻、10号、pp1798~pp1805)
・Experimental Studies of A Robot Tracking Controller for Robot Manipulators with Position Measurements Contaminated by Noise(平成15年6月)(The Fourth International Conference on Control and Automation, pp664~668)
・ツインリニアドライブ機構を有するリニアスライダの位置決め制御(平成15年3月)(電気学会D部門誌123巻、3号、pp278~pp285)
・The Position Control for a Linear-Slider with Twin Linear Drives(平成14年10月)(6th International Conference on Mechatronics Technology, pp445~450)
・Adaptive PI Control Method for Positioning Control using Liner Slider(平成14年9月)(Proceedings of the 2002 IEEE International Conference on Control Applications, pp588~pp593)
・Robust Model Following Control of a Feed Drive System hindered by a Machine Stand Vibration(平成14年6月)(Proceedings of International Symposium on Advanced Control of Industrial Processes, pp79~84)
・ロバストなモデル追従制御による機台振動系の振動抑制(平成14年4月)(日本機械学会論文集(C編)68巻668号、pp1127~1132)
・フレキシブルアームの仮想受動関節モデルに基づく制御系の一設計法(平成14年1月)(日本機械学会論文集(C編)、68巻、665号、pp109~pp116)
・2慣性サーボ系におけるフィードフォワード制御(平成13年9月)(高速信号処理応用技術学会論文誌、4巻、3号、pp19~24)
・Design Guidelines for Disturbance Observer’s Filter in Discrete Time(平成12年7月)(Proceedings of 7th International Workshop on Advanced Motion Control)
○その他(雑誌投稿など)
1.張力制御へのアドバンスト制御の応用(平成5年4月)
(技報安川電機 57巻No.4)
2.2慣性系の外乱抑圧制御(平成7年4月)
(技報安川電機 59巻 No.4)
3.新フレキシブルドライブシステム(New FDS)の概要(平成8年4月)
(技報安川電機 60巻 No.4)
4.メカトロシステムへの最適制御の供給(平成11年2月)
(技報安川電機 63巻 No.2)
○出願特許
○特許発明
(1)張力制御方法 特許第3285069
(2)張力制御方法 特許第3295920
(3)予測制御方法 特許第3870767
(4)位置決め制御装置 特許第4492095
(5)位置決め制御方法 特許第4501115
(6)ELECTRIC MOTOR CONTROL DEVICE 米国 第6873132
(7)MOTOR CONTROLLER 米国 第6914404
(8)POSITIONING CONTROL METHOD 米国 第6975086
(9)電動機制御装置 中国 第01816345.9
(10)電動機制御装置 中国 第02808397.0
○以下、出願のもの(公開されているもの)
(11)位置決め制御方法 WO00/052543(PCT)
(12)ウェブ張力制御方法 特許公開平09-110251
(13) 張力制御方法及び装置 特許公開平10-250888
(14)電動機電源切り替え方法 特許公開平10-253055
(15)IPMモータの制御方法及び制御装置 特許公開2000-023498
(16)データトラッキング方法 特許公開2000-042873
(17)電動機の位置および速度制御方法 特許公開2000-112528
(18)機械システムの同定装置 特許公開2001-8476
(19)電動機制御装置 特許公開2001-008477
(20)電動機制御装置 特許公開2002-058270
(21)電動機制御装置および制御方法 特許公開2002-163006
(22)電動機制御装置 特許公開2002-176791
(23)サーボ制御方法 特許公開2002-312003
(24)電動機制御装置 特許公開2002-315375
(25)機械システムの同定装置および同定方法 特許公開2002-351503
(26)電動機制御装置 特許公開2002-354857
(27)電動機制御装置 特許公開2002-354862
(28)サーボ制御装置の制御方法 特許公開2003-122402
(29)点字呈示装置 特許公開2003-255824
(30)位置決め制御装置 特許公開2004-094649
(31)分注装置のデータトレース方法 特許公開2004-184198
(32)仮想受動関節モデルのモデルパラメータ同定方法およびその制御方法
特許公開2004-265069
(33)多軸サーボ制御装置 特許公開2005-032101
(34)位置決め制御装置 特許公開2005-078479
(35)速度検出方法および装置 特許公開2005-140548
(36)位置決め制御装置 特許公開2005-141343
(37)分注装置および分注装置の分注チップ離脱方法 特許公開2005-172490
(38)電動機制御装置 特許公開2005-229734
(39)XY位置決め装置 特許公開2006-071536
(40)位置決め制御装置および位置決め制御方法 特許公開2006-113854
(41)位置決め制御装置および位置決め制御方法 特許公開2007-034969
(42)電動力変換装置および電動力変換方法 特許公開2007-043859
(43)サーボ制御装置とその制御方法 特許公開2008-017570
(44)速度演算器とそれを備えたモータ制御装置 特許公開2008-082760
(45)位置および速度同時計測装置とその計測方法 特許公開2008-082946
(46)位置決め装置 特許公開2008-117262