研究紹介 「マイクロメカトロニクス」
低電圧で大変形可能な静電マイクロアクチュエータ
1mm以下の微小な運動システムを実現するには、そのサイズに適した力や機構を利用する必要があります。
窓ガラスに付着した埃がなかなか取れないのを見てもわかるように、小さな物体に働く静電気力はその物体に働く重力などに比べて格段に大きくなります。
マイクロアクチュエータを駆動させる際にも、この静電気を利用するのが効率的であると考えられており、これまで世界中の研究者が様々なタイプの静電駆動型マイクロアクチュエータを開発してきました。
しかし、従来の静電マイクロアクチュエータで大きな変形量を得ようとすると、数10Vから100V以上の大きな電圧を必要とし、大きな変形量と小さな駆動電圧を同時に実現するのは難しいとされてきました。
私達はこの問題を打破するために、上の写真に示すような静電マイクロアクチュエータを製作しました。
わずかに上に反った薄い板状の棒がいくつか組み合わされていますが、この棒の先端が10V程度の電圧で下方に変位します。
現在、さらなる低電圧化、大変形化、微小化に向けて研究を行っています。
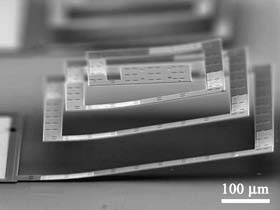
静電マイクロアクチュエータのSEM写真
静電マイクロアクチュエータの動作
生体に学ぶ感覚毛型マイクロセンサ
コオロギやゴキブリなどの昆虫は体の後端にとても微小な毛状の感覚器をもっています。この感覚器は周囲の空気の流れを高感度で検出することが可能です。
また、人間の平衡器官である半規管の中にも毛状の感覚器があり、リンパ液の流れが毛をたわませることによって平衡感覚が実現されています。
さらに、魚類の側線の中にも同様の器官があり、周囲の水の動きを毛のたわみによって検知しています。
このように、生体がもつ機械量センサを突き詰めていくと、毛状器官と流体との相互作用を利用したものを多数見つけることができます。
私達はこの生体のもつ機能と構造から学び、微小な感覚毛型センサを製作しました。
上の写真は毛の根元のひずみ量を静電容量の変化で検出するものです。その他、歪ゲージセンサを毛の根元に作り込むことによっても、感覚毛型センサを構築しました。
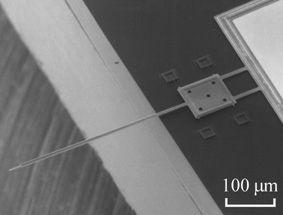
感覚毛型フローセンサ